
A Hamiltonian Look at a Soap Film
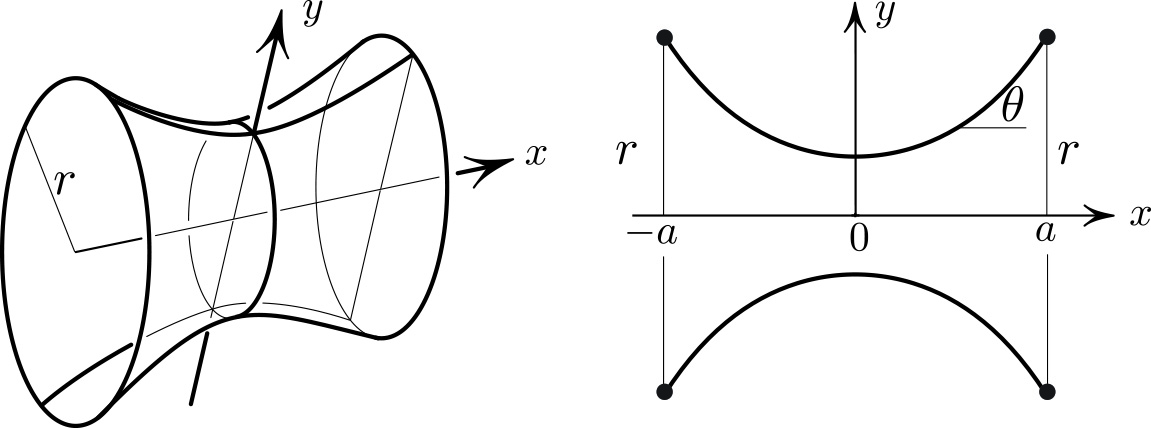
A soap film stretched between two rings that share a common axis—as in Figure 1—has a surface of minimal area that, when divided by \(2 \pi\), is
\[\int_{-a}^{a} \underbrace{y \sqrt{1+(y ^\prime) ^2 }}_{L(y,y ^\prime )} dx = \int_{x=-a}^{x=a} y\,ds\tag1\]
and subject to boundary conditions
\[y( \pm a ) = r.\tag2\]
Alternatively, \((1)\) is the potential energy of the film whose surface tension1 is \(1/ 2\pi\).
The Euler-Lagrange equation for the minimizer of \((1)\) does not look appealing, and I relegate it to a footnote later on. But interestingly, the equivalent Hamiltonian system turns out to be very symmetric and simple. Indeed, the standard definition2 of momentum \(p\) yields
\[p \overset{def}{=} L_{y ^\prime }(y,y ^\prime ) = \frac{y y ^\prime }{\sqrt{1+(y ^\prime) ^2 }} = y \sin \theta, \tag3\]
where \(\theta\) is marked in Figure 1. And by a short computation, the Hamiltonian \(H\overset{def}{=} p y ^\prime - L\) comes out to be
\[H = - \sqrt{ y ^2 - p ^2 } =- y \cos \theta.\tag4\]
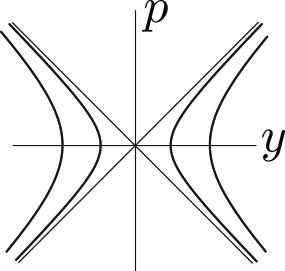
Trajectories of the Hamiltonian system, i.e., the level curves of \(H\), are hyperbolas \(y^2 - p^2 = {\rm const.}\) (see Figure 2). And Hamilton’s equations \(y ^\prime = H_p\), \(p ^\prime =- H_y\) are pleasantly simple:3
\[y ^\prime = -p/H, \ \ p ^\prime = -y/H.\tag5\]
Since \(H = {\rm const.}\) along solutions, we conclude that \(y ^{\prime\prime} = H^{-2}y\). By the symmetry of the boundary conditions \((2)\), \(y = y_0 \cosh (x/H)\). Setting \(x=0\) in the expression for \(H\) makes \(y=y_0\) and \(p \overset{(3)} = 0\). Consequently, \(|H| = y_0\) and thus
\[y=y_0 \cosh(x/y_0).\tag6\]
Here, \(y_0\) must be chosen so that \((2)\) holds.
Some Observations
- All minimal surfaces spanning two rings are dilations of one another. This is evident even without \((6)\) from the fact that dilations preserve the property of area minimization.
- If the rings are spread too far apart for fixed \(r\), the soap film will snap. How far is too far? The graphs of \((6)\) fill the sector \(y \geq s |x|\), where \(s=1.996 \ldots\) is the slope of the line through the origin tangent to the graph of \(y= \cosh x\) (see Figure 3b). A soap film can therefore span two rings iff \(r/a \geq s \approx 2\). The maximal possible distance between the rings is almost equal to their diameter!
![<strong>Figure 3. 3a.</strong> Graphs of \((6)\) fill the sector. <strong>3b.</strong> The definition of slope \(s=\min_{x>0}x ^{-1} \cosh x=1.996...\) <strong>3c.</strong> Points \(A\) and \(B\) satisfy \(r/a>s\) and two possible shapes exist for the soap film, but only \(AmB\) is stable and physically observable. Both curves \(AnB\) and \(AmB\) are geodesics in the metric \(y \,ds\), but only \(AnB\) has a conjugate pair of points \(a\) and \(b\). As such, it cannot be minimal; in fact, its Morse index is \(1\) [1]. In contrast, \(AmB\) has no conjugate points and is thus a minimizer of the “length” \(\int y\,ds\). The case of \(r/a=s\) is critical and unstable, as the two solutions coalesce into a saddle node of potential energy.](/media/drdjy03q/figure3.jpg)
Figure 3. 3a. Graphs of \((6)\) fill the sector. 3b. The definition of slope \(s=\min_{x>0}x ^{-1} \cosh x=1.996...\) 3c. Points \(A\) and \(B\) satisfy \(r/a>s\) and two possible shapes exist for the soap film, but only \(AmB\) is stable and physically observable. Both curves \(AnB\) and \(AmB\) are geodesics in the metric \(y \,ds\), but only \(AnB\) has a conjugate pair of points \(a\) and \(b\). As such, it cannot be minimal; in fact, its Morse index is \(1\) [1]. In contrast, \(AmB\) has no conjugate points and is thus a minimizer of the “length” \(\int y\,ds\). The case of \(r/a=s\) is critical and unstable, as the two solutions coalesce into a saddle node of potential energy. - Two critical functions of \((1)\) exist if \(r/a > s\) in Figure 3. However, only one is physically realizable (the other is unstable). If we had somehow managed to give the film an initial shape that was close to \(AnB\), it would either snap to \(AmB\) or pinch off.
- Equilibrium shapes are geodesics in the metric \(y\;ds\), and we can think of them as rays of light propagating through the medium with the speed of light \(c=1/y\). Indeed, the travel time for the light is \(\int dt= \int ds/c = \int y\,ds\) — the same expression as the area in \((1)\). So the area can be interpreted as either the potential energy of the film or as the travel time in the artificial optical medium.
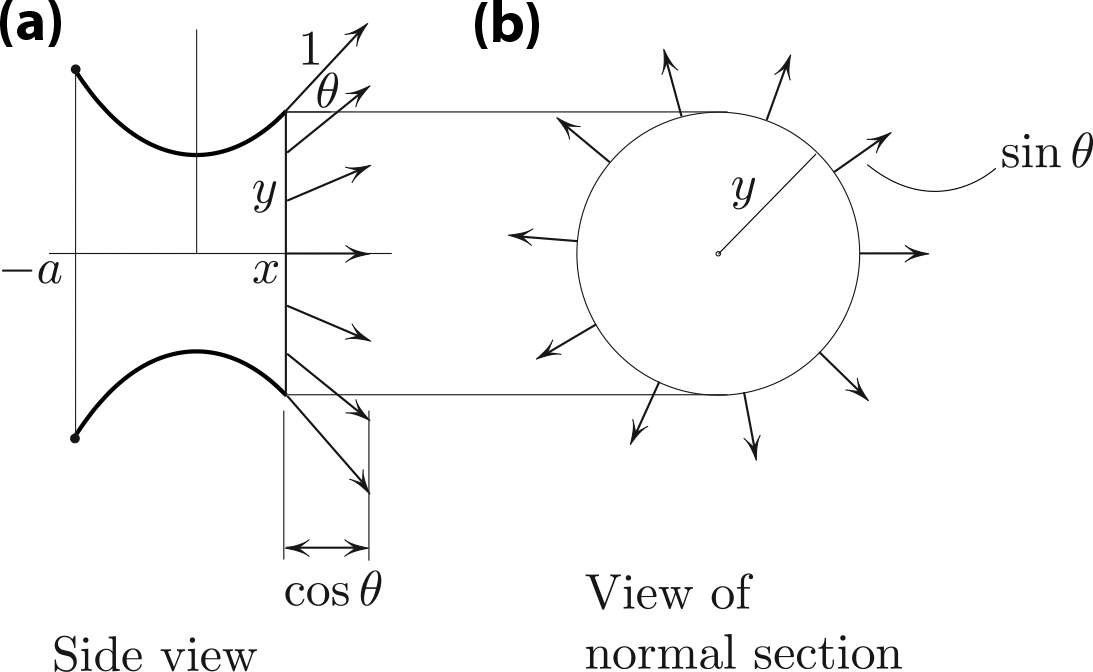
Figure 4. 4a. \(H\) is the horizontal force that acts on any section of the soap “tube,” up to a constant factor that depends on the surface tension. \(H= {\rm const.}\) as a function of \(x\) is the consequence of Newton’s first law. 4b. Here, \(y \sin \theta = p\) is the cumulative force on a portion of the tube that acts in the plane of the section. - More generally, if \((1)\) is replaced by \(\int_{a}^{b} F(y) ds\), then the corresponding Hamiltonian becomes \(H = F(y) \cos \theta\) and the momentum is \(p = F(y) \sin \theta\).
Physical Meaning of \(H\) and \(p\)
In dynamics, \(H\) and \(p\) are the energy and momentum. But in our static problem where \(x\) is the static counterpart of time, the meanings of \(H\) and \(p\) are different; instead, they are the forces that are described in the caption of Figure 4.
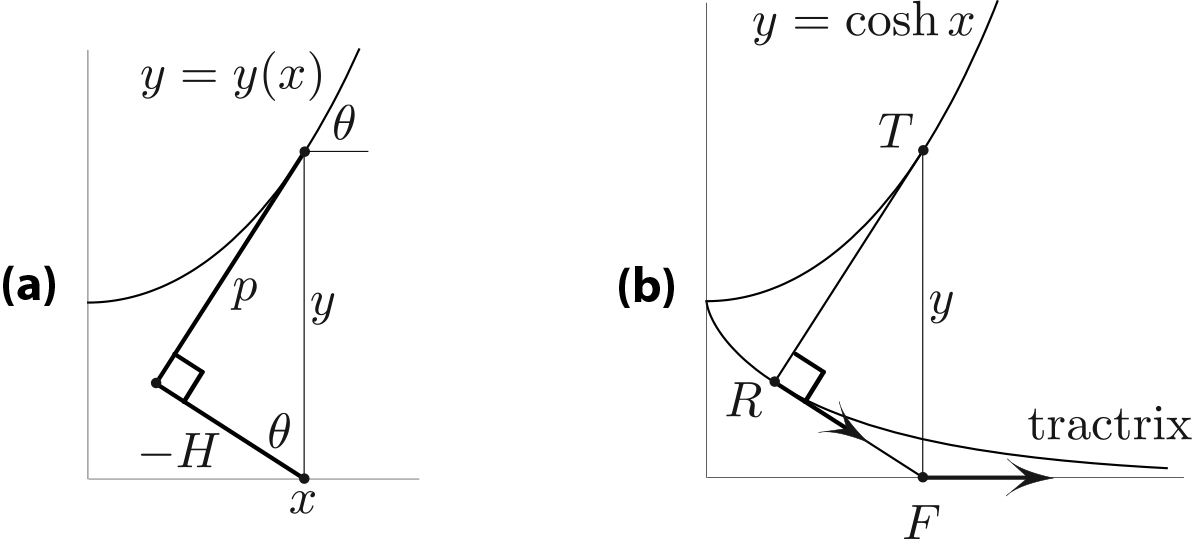
A Geometrical Interpretation of \(H\) and \(p\)
Figure 5a depicts an alternative interpretation of \(H\) and \(p\) (here, \(y(x)\) is any function). In Figure 5b, \(y\) is of the form \((6)\); as \(F\) slides along the \(x\)-axis, the length \(|FR| = {\rm const.}\) and the velocity of \(R\) points at \(F\) (proving the latter is left as a challenge).
1 Surface tension is the force that is applied to each side of an incision to hold the slit together per the incision’s unit length.
2 In almost all textbooks, the definitions of \(p\) and \(H\) are pulled out of thin air, although they do have a very natural and eye-opening motivation [1].
3 In contrast to the messier Euler-Lagrange equation: \(\frac{d}{dx} \frac{y y ^\prime }{\sqrt{1+(y ^\prime) ^2 }} - \sqrt{ 1+(y ^\prime) ^2 } = 0\).
The figures in this article were provided by the author.
References
[1] Levi, M. (2014). Classical mechanics with calculus of variations and optimal control: An intuitive introduction. In Student mathematical library (Vol. 69). Providence, RI: American Mathematical Society.
About the Author
Mark Levi
Professor, Pennsylvania State University
Mark Levi ([email protected]) is a professor of mathematics at the Pennsylvania State University.
Stay Up-to-Date with Email Alerts
Sign up for our monthly newsletter and emails about other topics of your choosing.
