
A is for Applied: Adventures in Wildlife Tracking
Applied mathematicians and other applied scientists must determine their level of commitment to the real-world applications of their research. My group’s specific contributions in this regard include fundamental innovations in mathematics and computer science, as well as engineering artifacts like software libraries. Maximizing the impact of a fundamental innovation—such as a new algorithm—often requires a high-quality software implementation. The inventor of the algorithm in question might design and implement the software themselves, or supervise the work of a graduate student or an engineer (both tactics still require time and effort). The inventor might even decide not to pursue any implementation efforts in the hope that others will, perhaps for profit or academic credit. How far should we go to serve our applications?
Here, I describe my research and development efforts from the past decade that have supported one particular application: tracking free-range wild animals in their natural environments. Both the nature of this application and my career circumstances have influenced my decisions over the years, but the issue itself is relevant to many SIAM members. SIAM is literally a society of applied and industrial mathematicians, and many of its special-interest Activity Groups focus on particular application areas. While the word “applied” appears only in the name of two groups—Applied and Computational Discrete Algorithms and Applied Mathematics Education—many others are also application-oriented, including Geosciences, Life Sciences, Mathematical Aspects of Materials Science, and Financial Mathematics and Engineering.

But let’s return to the case of wildlife tracking. Why is this application so important? And why is it so challenging? To start, organisms move. We routinely observe flying birds and know that some species migrate over large distances. We see mammals like squirrels and deer scurry across the terrain. Plants disseminate by dispersing their seeds. Even individual cells within tissues change positions. Animals move to eat and drink, find shelter, mate, and evade predators. Ecologists cannot understand the behavior of many species without understanding their movements, and they cannot understand their movements if they are unable to track individual animals.
Animal tracking for the purposes of scientific research began in the early 1800s, when John James Audubon banded birds and discovered that some return to the same nesting site every year. But banding—which involves marking an animal with a band or another identifying object for future visual observations—provides very little coarse-grained data. In the early 1960s, ecologists began to attach miniature radio transmitters to animals. Receivers with directional antennas could roughly measure the transmitter’s bearing, thus allowing the scientists to estimate the location of the marked animal. Directions and locations were usually estimated manually, which limited the amount of available data.
Global navigation satellite systems (GNSS), such as the Global Positioning System (GPS), made it possible for ecologists to easily track some species at high temporal and spatial resolutions. A GNSS receiver—like those that are embedded in every smartphone—can estimate its own location almost anywhere on Earth based on time-of-arrival estimates of signals that are transmitted by constellations of satellites. Certain tracking devices essentially function as specialized and ruggedized smartphones with solar chargers; these devices can track wild animals and use cellular networks to upload the data to the internet.
However, such trackers are limited to large diurnal species that fly or walk on land. Several factors are responsible for this restriction: the electronic devices are too heavy for small animals, solar panels require sun exposure, and GNSS radio signals are blocked underwater. So while ecologists can use this technology to track creatures like elephants and storks, it is not suitable for tracking bats, marine animals, and small birds and mammals.
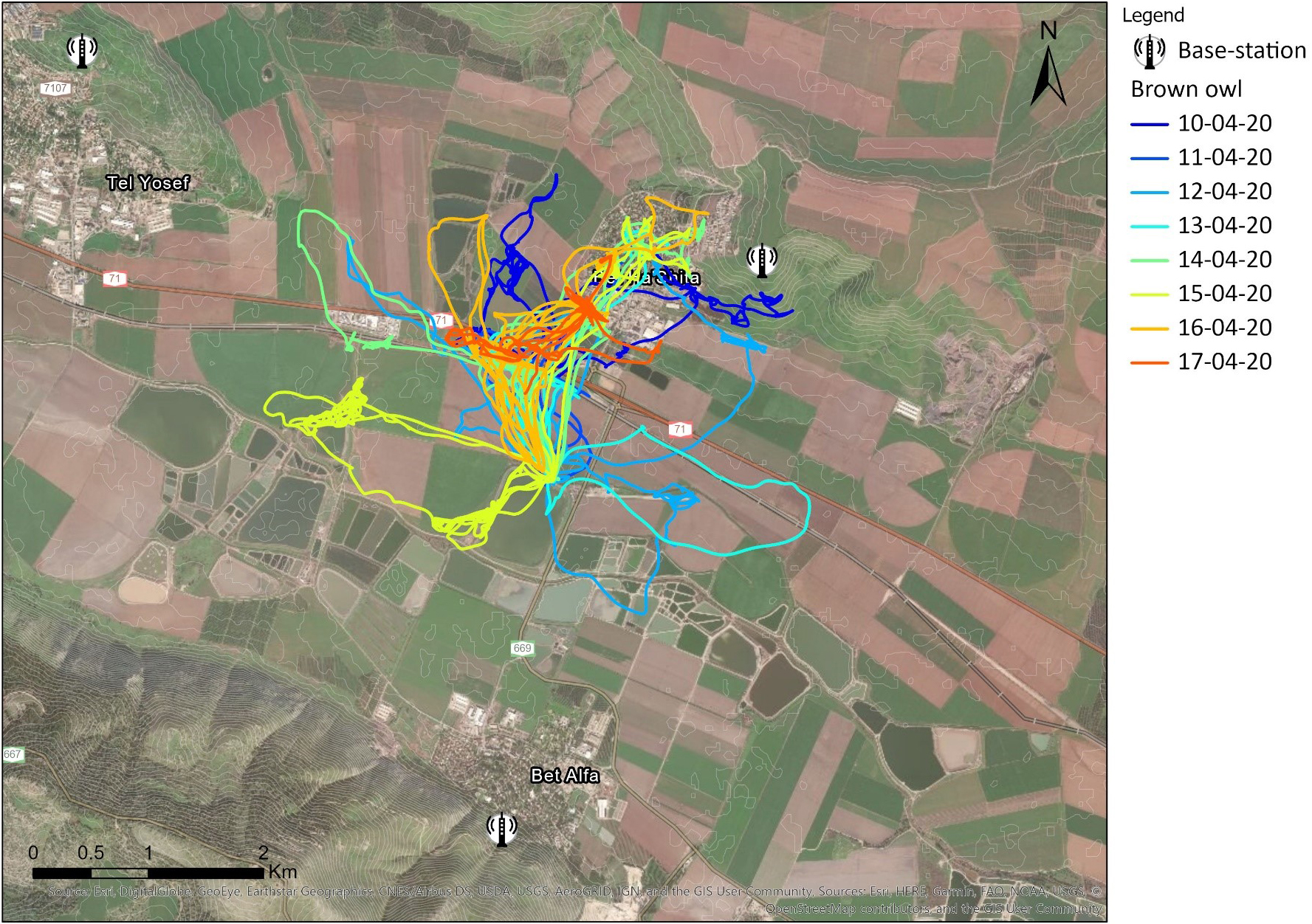
Therefore, when I got a call 11 years ago from ecologist Ran Nathan of the Hebrew University of Jerusalem suggesting that we collaborate to develop a wildlife tracking system for small animals, I readily agreed. We developed a system called ATLAS that estimates the location of miniature radio transmitters that are attached to wild animals such as birds, bats, and small mammals and reptiles. These devices—called tags—transmit periodic pings (see Figure 1); the transmitted signals resemble those of GPS and are suitable for time-of-arrival estimation. Between four and roughly 30 receivers collect the pings, estimate the arrival times, and send the estimates to a server, which then estimates the location of the tag — and hence the animal (see Figure 2). To allow operation with small batteries and comply with radio regulation, the transmitted signals are weak (10 milliwatts or less), meaning that their range is limited to a few kilometers. We can deploy a network of receivers that covers an area of a few square kilometers to hundreds of square kilometers, but the coverage is not global. Our system only tracks animals when they are within the coverage area of one of these networks.
ATLAS tags that weigh less than a gram and ping every eight seconds remain operational for a week or two, but tags that weigh around 10 grams can last for more than a year with the same ping rate. Location errors are similar to those of GPS and range from several meters to tens of meters. We have set up 12 ATLAS systems over the past nine years in locations from Australia to the Arctic (see Figure 3). Five of these sites have already led to 11 ecology papers that published in journals like Science [4] and Proceedings of the National Academy of Sciences [2]. These systems generally work 24/7, often for years. By the spring of 2022, we had deployed about 7,000 tags on wild animals; in fact, some of our specific results are based on tracking information from over 200 individual animals. These are large numbers in the field of movement ecology, and we expect them to grow in the coming years.
ATLAS is the only tracking system of its kind: an automated solution for the radio tracking of many small animals in an area of up to a few hundred square kilometers. To build ATLAS, we had to select a few commercial components (e.g., antennas, amplifiers, and sampling radio receivers) and develop many other components ourselves (e.g., miniature transmitters, radio front ends, signal processing software for both central processing units and graphics process units, location estimation algorithms, distributed data management structures, database schemas, monitoring and visualization software, and schedulers for servers and receivers). Developing some of these components and demonstrating their effectiveness certainly required innovation and led to 14 technical and methodological articles [3, 6].
I have been personally involved in every research and development effort in this project. I worked with graduate students to develop some of the components, but developed others myself. I addition, I maintain the software and hardware design and support ATLAS users. Maintenance, documentation, and continued support are all absolutely necessary to keep this system operational and usable. I spend an atypically large fraction of my time on these types of tasks and a smaller fraction on innovation when compared to most academics, but this balance is appropriate for me because it allows me to contribute to science in a significant, meaningful, and unique way.

To find success as a scientist in academia, government, or industry, you need to demonstrate impact. Nowadays, scientific impact is often measured quantitatively via metrics like citations, the h-index, impact factors, publication counts, and so on. Planning a project or even a career not only requires innovation and engineering activities, but also proof of impact. In our case, ATLAS is spread through scientific collaborations in which ecologists and technical researchers share credit for both technical papers and broader ecology articles.
Projects that require significant engineering efforts often reveal interesting open problems, including ones whose solutions are only tangential to the task at hand. I encountered several such problems while working on ATLAS, some of which I solved with students or colleagues. In one case, my collaborators and I discovered rigorous proofs and precise statements of theorems for an old mathematical navigation problem called the cocked hat problem [1]. In another instance, a student and I developed a formal mixed-integer programming model and new algorithms for a specialized GPS localization problem [5].
Mathematicians and scientists constantly make short-term plans and long-term career decisions. Should I pursue this theoretical problem? Should I develop a robust high-performance implementation of an algorithm? What should my next proposal address? The decisions that I’ve made over the past decade were appropriate for me and my research, but they obviously cannot and should not be copied. As you make your own choices, you too should strive to balance innovation with impact—including impact outside of your field and community—and seek the appropriate recognition and credit for your contributions. Why? Because like me, you are part of SIAM: a society in which “A” stands for applied.
Sivan Toledo delivered an invited presentation on this topic at the 2023 SIAM Conference on Applied and Computational Discrete Algorithms, which took place in Seattle, Wash., last year.
References
[1] Bárány, I., Steiger, W., & Toledo, S. (2021). The cocked hat: Formal statements and proofs of the theorems. J. Navig., 74(3), 713-722.
[2] Roeleke, M., Schlägel, U.E., Gallagher, C., Pufelski, J., Blohm, T., Nathan, R., … Voigt, C.C. (2022). Insectivorous bats form mobile sensory networks to optimize prey localization: The case of the common noctule bat. Proc. Nat. Acad. Sci., 119(33), e2203663119.
[3] Toledo, S., Mendel, S., Levi, A., Vortman, Y., Ullmann, W., Scherer, L.-R., … Nathan, R. (2022). Vildehaye: A family of versatile, widely-applicable, and field-proven lightweight wildlife tracking and sensing tags. In IPSN ’22: Proceedings of the 21st ACM/IEEE international conference on information processing in sensor networks. Association for Computing Machinery and Institute of Electrical and Electronics Engineers.
[4] Toledo, S., Shohami, D., Schiffner, I., Lourie, E., Orchan, Y., Bartan, Y., & Nathan, R. (2020). Cognitive map-based navigation in wild bats revealed by a new high-throughput tracking system. Science, 369(6500), 188-193.
[5] Waserman, E., & Toledo, S. (2021). A mixed-integer least-squares formulation of the GNSS snapshot positioning problem. J. Navig., 74(6), 1267-1283.
[6] Weiser, A.W., Orchan, Y., Nathan, R.,i Charter, M., Weiss, A.J., & Toledo, S. (2016). Characterizing the accuracy of a self-synchronized reverse-GPS wildlife localization system. In IPSN ’16: Proceedings of the 15th ACM/IEEE international conference on information processing in sensor networks (pp. 1-12). Vienna, Austria: Association for Computing Machinery and Institute of Electrical and Electronics Engineers.
About the Author
Sivan Toledo
Professor, Tel-Aviv University
Sivan Toledo is a professor of computer science in the Blavatnik School of Computer Science at Tel-Aviv University.

Stay Up-to-Date with Email Alerts
Sign up for our monthly newsletter and emails about other topics of your choosing.
